

En juillet 2019, des navires de l’US Navy ont été survolés impunément par plusieurs drones, mettant en défaut les capteurs des bâtiments. Leur trajectoire n’a pu être suivie par les différents senseurs radars, optroniques et de guerre électronique. Ce dernier, l’AN/SLQ-32 qui équipe les bâtiments de combat de l’US Navy, est un système spécialisé dans la détection des radars et n’est donc pas en mesure de détecter les liaisons de données avec les drones. Toutefois, on peut être surpris par le fait que des bâtiments de la classe Arleigh Burke, équipés du très puissant radar AN/SPY-1, n’ont pas été en mesure de suivre l’évolution des drones ni de les détecter avant qu’ils ne s’approchent des navires.
De même, en décembre 2019, 5 à 6 drones ont survolés les installations nucléaires de Palo Verde alors que le site était protégé par un système anti-drone fourni par la société Aerial Armor, lequel comprend, entre autres des radars conçus spécialement pour la détection des drones.
Alors pourquoi les radars ont-ils été mis en défaut concernant la détection et le suivi des drones ? Il semble pourtant bien qu’ils les aient quand même détectés, mais pas tout le temps et surtout beaucoup trop tard. La détection des drones par les radars pose de nombreux défis et présente certaines limitations physiques qu’il est bon de connaître.
Problème de détection par les radars de veille
Les drones dont il est question ici sont des machines de relativement petite taille qui ont donc une SER (surface équivalente radar) faible. Cela signifie qu’une part infime de l’énergie électromagnétique du radar est renvoyée par la cible. La conséquence est que la portée de détection est faible et plus un drone sera petit et plus cette portée de détection sera réduite. Néanmoins, l’amélioration constante de la technologie radar permet d’augmenter leur sensibilité donc leur capacité à détecter des cibles à très faible SER. Seulement, plus on augmente la sensibilité d’un radar et plus il détecte de choses comme les oiseaux, les nuages d’insectes, des nuages de poussière, etc. Or, plus le radar détecte de choses, moins la situation tactique est lisible. Plus il est difficile de faire le tri entre les pistes qu’il faut caractériser, ce qui renforce le risque de passer à côté de ce qui est important. Il y a donc un compromis à faire entre sensibilité et capacité à détecter les petits objets.
Certes, le traitement doppler permet d’éliminer les objets qui ne se déplacent pas suffisamment vite — dont on peut supposer qu’ils ne sont pas d’un grand intérêt — mais la gamme de vitesse des drones de petite taille est faible également. En conséquence, il est possible de voir un radar détecter un avion « furtif » ayant une SER très faible, mais pas un drone de même SER, parce que sa vitesse de déplacement est bien plus faible ; il est dès lors en dessous du seuil de détection.
Il faut aussi prendre en compte que les ondes radioélectriques ne suivent pas la rotondité de la terre et que plus une cible se trouve loin d’un radar et plus elle devra être en altitude pour être détectée. D’ailleurs la tactique d’approche au raz de l’eau de certains missiles antinavires est justement faite pour retarder le plus possible la détection. Une cible lente évoluant près des flots sera d’autant plus difficile à extraire qu’elle sera noyée dans le retour de mer généré par les vagues.
Autre point, les radars de veille, qu’ils soient spécifiquement dédiés à la surveillance de l’espace aérien ou multifonctions — c’est-à-dire à la fois capable de détecter des cibles aériennes ou de surface comme l’AN/SPY-1 —, sont conçus pour émettre une énergie électromagnétique assez importante afin de disposer d’une portée de détection de plusieurs dizaines à plusieurs centaines de kilomètres. En conséquence, leur puissance d’émission est relativement importante, de plusieurs dizaines de kilowatts à quelques mégawatts.
Sur les radars dits « classiques », les voies émission et réception sont séparées de façon à protéger la voie émission conçue pour détecter des puissances extrêmement faibles. Ainsi lors de l’émission, la voie réception est bloquée.
Les radars modernes de type PESA (Passive Electronically Scanned Array) et AESA (Active Electronically Scanned Array) fonctionnent un peu différemment. Dans le premier cas, un émetteur unique distribue la puissance vers des déphaseurs, alors que dans le second, la puissance est générée par la somme des éléments émetteurs qui font aussi office de déphaseurs. Néanmoins, dans tous les cas, ces radars ne peuvent pas recevoir en même temps qu’ils émettent.

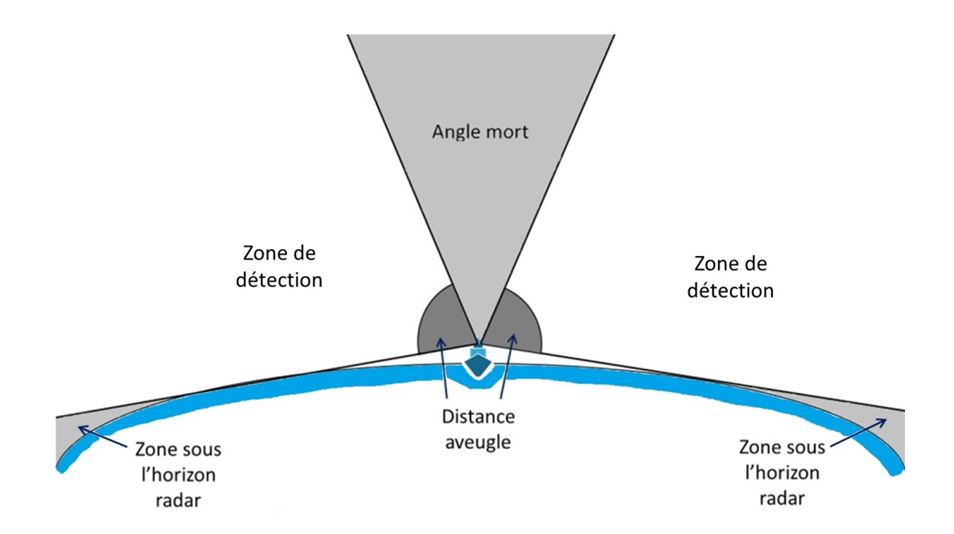
Ce sont des radars dits impulsionnels, c’est-à-dire qu’ils émettent des impulsions suivies d’un temps d’écoute. De ce fait, les radars sont aveugles le temps de l’émission. C’est ce que l’on appelle leur « distance aveugle » , laquelle correspond à la zone autour du radar où ils ne peuvent pas détecter la présence éventuelle de cibles. Selon les radars, cette distance aveugle peut aller de quelques dizaines de mètres à plusieurs kilomètres.
Dans le cas des bâtiments de l’US Navy, le radar AN/SPY-1 a une distance aveugle comprise entre 1 km et 7,5 km selon son mode de fonctionnement. Autre exemple, le nouveau radar de veille aérienne militaire français, le Ground Master 400, a une distance aveugle de 5 km.
Si l’on en revient à l’incident impliquant les drones s’étant approchés des bâtiments de l’US Navy, on peut raisonnablement penser que les drones étaient trop petits pour être détectés de loin et/ou volaient trop bas sur l’eau. Une fois qu’ils ont été suffisamment proches des navires, ils se sont retrouvés dans la zone de distance aveugle du radar. Ces drones pouvaient alors même voler verticalement au-dessus des bâtiments de surface en restant dans le cône mort des radars, qui ne peuvent généralement pas détecter à la verticale. Même chose pour les systèmes optroniques faisant alors bénéficier les drones assaillants d’une forme d’immunité.
Problèmes de détection par les radars anti-drones
Les drones représentant une nouvelle menace aux caractéristiques très différentes des cibles traditionnelles des radars, certains constructeurs ont décidé de développer des radars spécifiquement conçus pour traiter ce type de cibles lentes et de petite taille.
Ayant conscience que les portées de détection sont faibles, les constructeurs ont choisi de diminuer autant que possible, voir totalement, la distance aveugle : soit en optant pour des impulsions ultra courtes ; mais surtout en optant pour des radars à onde continue (FMCW).
L’utilisation d’impulsions courtes diminue certes la distance aveugle mais présente d’autres inconvénients. En effet, plus une impulsion est courte :
- moins la résolution (capacité à distinguer plusieurs cibles proches) et la précision angulaire sont bonnes, du fait de l’élargissement du faisceau ;
- plus les lobes secondaires sont importants (vulnérabilité au brouillage et augmentation potentielle des erreurs de direction) ;
- moins il est possible de calculer les vitesses doppler réduites, donc d’éliminer le bruit ambiant (suppression des échos fixes).
Pour compenser en partie ces défauts, certains radars utilisent en alternance des impulsions plus longues. Néanmoins, ces impulsions entraînent une distance aveugle bien plus grande ce qui fait que les défauts restent sur les courtes distances. Le seul avantage des radars impulsionnels, dans la détection de drones est qu’ils peuvent émettre des puissances relativement importantes, ce qui leur permet d’obtenir des portées de détection supérieures aux radars à onde continue.
Les radars à onde continues disposent de deux voies séparées, l’une pour l’émission et l’autre pour la réception, de telle sorte que la voie réception n’est pas impactée par l’émission. La contrainte est que la puissance émise par la voie émission doit rester limitée afin de ne pas provoquer des remontées de bruit dans l’étage de réception. En pratique cela limite la « puissance crête » émise à quelques dizaines de watts. En conséquence, ce type de radar a des portées de détection qui restent modestes, de seulement quelques kilomètres à quelques dizaines de kilomètres au maximum. Il serait impossible, physiquement, que ce type de radar puisse avoir une portée de plusieurs centaines de kilomètres, sauf à séparer complètement la partie émission de la partie réception, mais ce seraient alors des radars bi-statiques.
De plus, ces radars à onde continue utilisent des variations en fréquence relativement importantes. C’est cette variation en fréquence qui donne la précision et la résolution/distance et qui autorise également des mesures doppler (mesure de vitesse radiale) très fines. Cela permet d’extraire les objets se déplaçant lentement. Il est ainsi possible, selon les radars, de détecter des vitesses minimales entre 0,3 et 8 km/h, ce qui est très peu. Le radar peut alors supprimer tous les retours sans vitesse doppler, donc les objets immobiles, représentés par le relief, les bâtiments etc. Toutefois, l’inconvénient est que ce type de radar détecte beaucoup d’autres choses que des drones (oiseaux, les nuages d’insectes, de poussière, etc.). Les très faibles vitesses pouvant être mesurées, ces radars détectent aussi le mouvement des feuilles, des branches, des panneaux ou des lampadaires avec le vent et de tout autres objet susceptible de bouger, comme les piétons ou les véhicules. Selon les environnements, ces radars peuvent très vite se retrouver saturés de fausses détections qui brouilleront leur vue. La détection d’un drone peu vite devenir très difficile car il n’aura aucun mal à se cacher dans le bruit. En pratique, ces radars sont d’un usage compliqué dans des environnements urbains, industriels ou en présence de végétation. Ils ne sont réellement efficaces que dans des zones très dégagées, sans obstacles, comme les aéroports par exemple. Pour limiter les perturbations, les industriels sont tentés d’installer ces radars assez haut en inclinant l’antenne vers le haut afin d’éviter au maximum les obstacles, mais cela a l’inconvénient de négliger la détection à basse altitude, ce qui fait qu’un drone volant bas risque de ne pas être détecté.
L’autre avantage des radars FMCW est leur capacité à faire du traitement micro-doppler, c’est-à-dire à détecter la rotation des hélices des drones, ce qui offre une capacité de classification des détections en séparant ces engins des oiseaux. Toutefois, l’efficacité de cette méthode de classification sera très variable en fonction des caractéristiques aérodynamiques du drone (voilure tournante, voilure fixe ou multicoptère), de la composition des hélices (plastique, fibre de carbone, bois…) et de la distance du drone. En pratique, cette classification, quand elle est possible, ne l’est qu’à assez courte distance (quelques centaines de mètres au maximum).
Dernier point, ces radars sont peu puissants, ce qui signifie aussi qu’ils sont facilement brouillables. De fait, leur intégration dans un système comprenant plusieurs radars, comme sur les navires de combat par exemple, peut se révéler très délicate. En effet, aucun autre émetteur travaillant dans la même bande de fréquence ne pourra être toléré au risque de complètement brouiller ce radar lors de son fonctionnement. Or ces radars fonctionnent souvent dans la même gamme de fréquence que les radars de navigation ou de surveillance côtière, ce qui peut rendre leur emploi dans un environnement marin ou côtier compliqué.
* * *
Un radar, comme tout capteur, est le fruit de compromis (portée de détection, sensibilité, précision, résolution, vitesse minimale mesurées etc.) comportant des avantages et des inconvénients. Ceci implique que le choix du radar, ainsi que ses réglages, doivent être effectués en fonction de l’environnement dans lequel il devra fonctionner. Les drones représentent un type de plateforme qui cumulent plusieurs difficultés (petite taille, vitesse faible), ce qui les rend particulièrement difficiles à détecter et à caractériser. Comme aucune solution radar n’est parfaite, un pilote de drone connaissant un peu les caractéristiques du radar qu’il aura à déjouer n’aura pas de difficultés à en exploiter les faiblesses. Difficile de dire si ceux qui opéraient les drones ayant harcelé les navires de l’US Navy avaient fait cette analyse, mais ils ont néanmoins profité volontairement ou non de leurs limites de détection.
Il sera souvent possible, pour un drone de s’approcher d’un navire militaire, d’un système d’arme sol/air ou de tout autre radar, quelle que soit leur nationalité, même de très près, sans être détectés.
En conséquence, la solution radar ne peut, à elle-seule, représenter un moyen suffisant de détection contre les drones. Le radar doit impérativement être complété par un autre moyen de détection primaire beaucoup moins sensible à la taille ou à la vitesse de déplacement des drones, comme la détection radiofréquence ou certains systèmes optroniques par exemple.
Olivier DUJARDIN /CF2R
[1] https://www.air-cosmos.com/article/lus-navy-survole-par-des-drones-inconnus-24599
[2] https://www.aubedigitale.com/un-mysterieux-essaim-de-drones-a-penetre-dans-un-espace-aerien-securise-au-dessus-de-la-plus-grande-centrale-nucleaire-des-etats-unis/



{kind=link}